I’ve been working on the lucid dream lab and I have made a lot of progress. Today, I’m going to share just one part of the lab: sending a text message with your eyes in morse code.
Texting With Eye Movements

Hardware:
- Heart and Brain SpikerShield Bundle
- discontinued. An alternative option might be a Ganglion from OpenBCI
Since the Heart and Brain SpikerShield Bundle is discontinued I would like to redo this with OpenBCI in the near future. But, if you are up for it, you can try to adapt this project using an OpenBCI product on your own.
How It Works
- The subject wears electrodes connected to the hardware and signals in morse code.
- Looking left is akin to pressing down the telegraph button. Looking right is akin to releasing the button.
- Holding your eyes left for 4 or more seconds and then looking right, means “send the message”
- Holding your eyes right for 4 or more seconds and then looking left, means “I f**ked up! Delete the message so far.”
- The electrodes send data to the arduino program
- The arduino program interprets the data.
- It figures out which data means the eye moved left or right.
- It converts the eye movements to morse code.
- It converts morse code to English.
- It serial prints the message with the delimiter ‘SND’.
- The node program watches the serial port for data from the arduino. Once it sees the delimeter ‘SND’ it recieves the message. It then executes a bash file with the message.
- The bash file takes the message and sends it to whomever is named “Mom” in your contacts. This only works if you have Messages app and a Mac I believe.
EOG
The hardware uses EOG. EOG records eye movement. Electrodes are placed on the outer edges of the eyes. The back of your eye has more electrical activity than the front (Don’t quote me). So when you look left, the backs of your eyes are closer to the right electrode. And further from the left electrode. So the electrodes can sense a change occurred.
You get a bunch of data from the electrodes in the form of numbers from 1-1024 when you analogRead() the input stream in Arduino.
This is what the data looks like when mapped out visually over time.
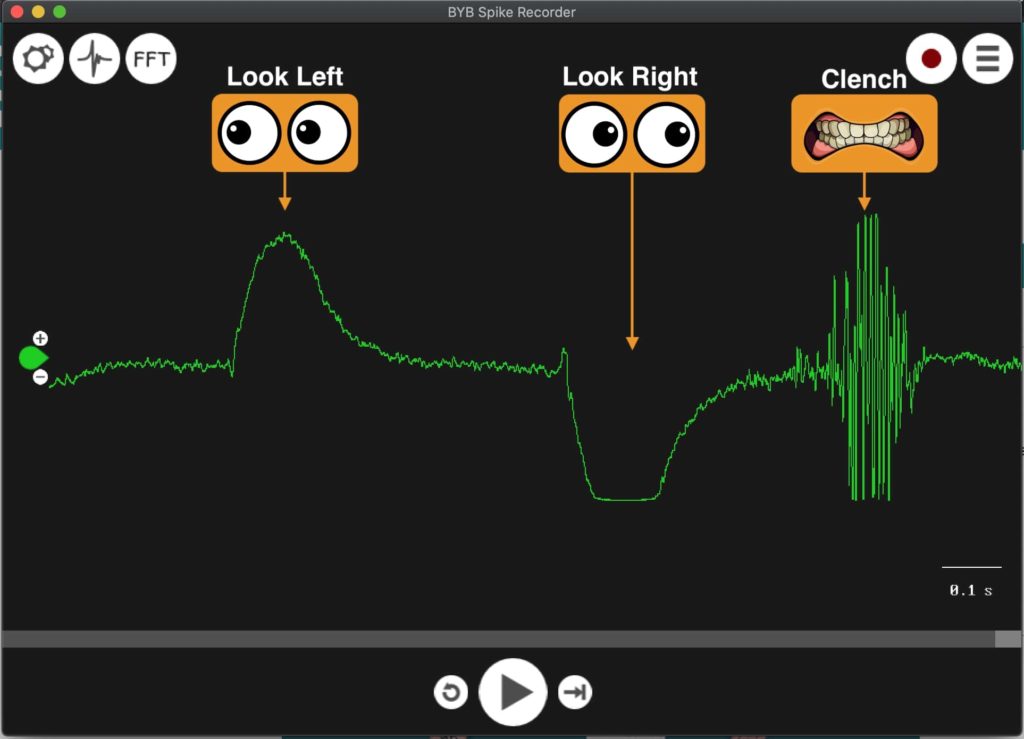
Clenching also affects the data. So in the code we detect jaw clenching but ignore it.
One thing isn’t clear from the graph:
You might think that if you hold your eye to the left, the peak will stay up and span a wider distance in the graph. But no. It will drop back down to the middle range immediately, regardless of how long you look left. If we want to know how long the eye stayed looking left, we look for a dip downward. That means the eye has move right, away from the left position it just occupied.
Heart and Brain SpikerShield Setup
The alligator clip with the pink wire goes on the left side of your eyes. The red wire goes on the right side of your eyes. The black wire goes on your mastoid process. More info here
Arduino Code
#define EOG A0
//Eye movement Variables
const int bufferSize = 20;
const int highThreshold = 600;
const int lowThreshold = 422;
int readingsBuffer[bufferSize]; //last readings
bool lastSignalWasLeft; //We must store that the last signal was left.
//multiple "lefts" will get processed unless we tell
//the sketch to ignore the signal once we know what it is
bool lastSignalWasRight; //^same for right
//Morse code Variables
unsigned long morseBitBase = 800 ; //morse bit length, you can change this to be longer or shorter depending on your morse code speed
unsigned long wiggleRoom = 0; //aka tolerance- you can add some extra milliseconds to account for accodentally going slower.
unsigned long morseBit = morseBitBase + wiggleRoom;
unsigned long morse3Bit = (morseBit *3) +wiggleRoom;
bool subjectStartedSignaling = false;
String subjectsMorseCode = "";
enum morseState {
NEW_INTRA_CHARACTER,
NEW_CHARACTER,
NEW_WORD,
NEW_MESSAGE //message variable
};
enum morseState currentMorseState = NEW_INTRA_CHARACTER;
unsigned long lastSignalChangeAt;
bool lastSignal;
unsigned long clearGapLength = morseBit*5 +wiggleRoom; //message variable
unsigned long sendBeepLength = morseBit*5 +wiggleRoom; //message variable
//message variables
String delimeter = "SND";
String message = "";
void setup() {
Serial.begin(115200);
}
void loop() {
int reading = analogRead(EOG);
unsigned long now = millis();
updateReadingsBuffer(reading);
//---------------determine if the last analogRead signals was an eye movement---------------------
String eog = determineEOGSignal(); //returns string "Left", "Right", "Jaw", "Normal"
bool eyeMovementDetected = eog == "Right" || eog == "Left";
//------------------------------Morse Code------------------------------
if (eyeMovementDetected){
if (!subjectStartedSignaling) {
subjectStartedSignaling = true;
} else {
unsigned long signalLength = now-lastSignalChangeAt;
char morseIntraChar = signalToMorse(signalLength, lastSignal);
/////////////////////////////////////////////////////////////
// All of the Serial.print's need to be commented out
// when you are actually sending this to node
// except for 'Serial.println(message +"SND");'
// However, they can be helpful for depugging.
// So I am leaving them in, commented out.
//////////////////////////////////////////////////////////////
// Serial.print("subjectsMorseCode: '");Serial.print(subjectsMorseCode);Serial.println("'");
if (morseIntraChar != 'g' && morseIntraChar != '*' && morseIntraChar != 'S'){
subjectsMorseCode.concat(morseIntraChar);
} else if (morseIntraChar == 'S'){
Serial.println(message +"SND");
message = "";
subjectsMorseCode ="";
} else if (morseIntraChar != '*' && morseIntraChar != 'S'){
if (currentMorseState == NEW_CHARACTER || currentMorseState == NEW_WORD){
char engChar = morseToEnglishChar(subjectsMorseCode);
// if (engChar=='*')Serial.print("error, wrong input: "+subjectsMorseCode);
// Serial.print(" char: ");
// Serial.println(engChar);
if (engChar!='*'){
if(currentMorseState == NEW_WORD) message.concat(" ");
message.concat(engChar);
//
// Serial.print("message pending: ");
// Serial.println(message);
}
subjectsMorseCode ="";
} else if (currentMorseState == NEW_MESSAGE){
message = "";
subjectsMorseCode ="";
// Serial.print("cleared message pending: ");
// Serial.println(message);
}
}
}
lastSignalChangeAt = now;
lastSignal = eog == "Right" ? 0 : 1;
}
} //==========end void loop========
//===============================Eye Movement Interpretation functions=========================
void updateReadingsBuffer(int reading){
for(int i = 0; i < bufferSize-1; i++)
{
readingsBuffer[i] = readingsBuffer[i+1];
}
readingsBuffer[bufferSize-1] = reading;
}
String determineEOGSignal(){
int reading = readingsBuffer[bufferSize-1];
String determinedSignal;
if(!isNormal(reading)){
// what is the signal?
if(signalIsJawClench(readingsBuffer)){
determinedSignal = "Jaw"; //your jaw clenched
} else if(signalIsEyeLeft(readingsBuffer) && !lastSignalWasLeft){
lastSignalWasLeft = true;
lastSignalWasRight = false;
determinedSignal = "Left";
} else if(signalIsEyeRight(readingsBuffer) && !lastSignalWasRight){
lastSignalWasRight = true;
lastSignalWasLeft = false;
determinedSignal = "Right";
} else {
determinedSignal = "Normal";
}
} else {
determinedSignal = "Normal";
}
return determinedSignal;
}
bool isNormal(int reading){ if (reading > lowThreshold && reading < highThreshold) {return true;}else{return false;}; };
bool isHigh(int reading){ if (reading > highThreshold) {return true;}else{return false;}; };
bool isLow(int reading){ if (reading < lowThreshold) {return true;}else{return false;}; };
bool signalIsJawClench(int readings[bufferSize]){
for(int i = 0; i < bufferSize; i++)
{
if(isHigh(readings[i])){ //if any reading is high
for(int i2 = i; i2 < bufferSize-i; i2++){
if(isLow(readings[i2])){ // and any proceeding reading is low
return true;
}
}
}
if(isLow(readings[i])){ //if any reading is Low
for(int i2 = i; i2 < bufferSize-i; i2++){
if(isHigh(readings[i2])){ // and any proceeding reading is HIgh
return true;
}
}
}
}
return false;
}
bool signalIsEyeRight(int readings[bufferSize]){
for(int i = 0; i < bufferSize; i++){
if(!isHigh(readings[i])){
return false;
}
}
return true;
}
bool signalIsEyeLeft(int readings[bufferSize]){
for(int i = 0; i < bufferSize; i++){
if(!isLow(readings[i])){
return false;
}
}
return true;
}
//=============================Morse Code Interpretation functions===================================
char signalToMorse(unsigned long signalLength, bool signalType ){
char morse;
if(signalType){
morse = interpretBeep(signalLength);
} else {
manageMorseState (signalLength);
morse = 'g'; //gap
}
return morse;
}
char interpretBeep (unsigned long millisBeep){
char meaningOfBeep;
if ( millisBeep >= 100 && millisBeep <= morseBit){
meaningOfBeep = '.';
} else if ( millisBeep > morseBit && millisBeep < sendBeepLength){
meaningOfBeep = '-';
}else if ( millisBeep >= sendBeepLength){
meaningOfBeep = 'S'; //means "SEND"
} else {
meaningOfBeep = '*'; //means noise- ignore
}
return meaningOfBeep;
}
void manageMorseState (unsigned long millisGap){
if ( millisGap < 100 ){
return; //noise
} else if ( millisGap >= 100 && millisGap <= morseBit){
currentMorseState = NEW_INTRA_CHARACTER;
} else if ( millisGap >= morseBit && millisGap < morse3Bit){
currentMorseState = NEW_CHARACTER;
} else if ( millisGap > morse3Bit && millisGap < clearGapLength ){
currentMorseState = NEW_WORD;
} else if ( millisGap > clearGapLength ){
currentMorseState = NEW_MESSAGE; //aka clear last message
}
}
char morseToEnglishChar(String morse)
{
//Serial.print("morse code: ");
//Serial.println(morse);
static String letters[] = {".-", "-...", "-.-.", "-..", ".", "..-.", "--.", "....", "..", ".---", "-.-", ".-..", "--", "-.", "---", ".--.", "--.-",
".-.", "...", "-", "..-", "...-", ".--", "-..-", "-.--", "--..", "E"
};
int i = 0;
char englishChar;
if (morse == ".-.-.-")
{
englishChar = '.'; //for break
}
else if (morse == ".-.-.--")
{
englishChar = '!'; //for !
} else if (morse == "..--..")
{
englishChar = '?'; //for ?
}
else
{
while (letters[i] != "E") //loop for comparing input code with letters array
{
if (letters[i] == morse)
{
englishChar = (char('A' + i));
break;
}
i++;
}
if (letters[i] == "E")
{
englishChar = '*'; //if input code doesn't match any letter, error
}
}
return englishChar;
}
Node.js Code
More info here
const SerialPort = require('serialport');
const Readline = require('@serialport/parser-readline');
const shell = require('shelljs');
const port = new SerialPort('/dev/cu.usbmodem14101', { baudRate: 115200 });
const parser = port.pipe(new Readline({ delimiter: 'SND' }));
// Read the port data
port.on("open", () => {
console.log('serial port open');
});
parser.on('data', data =>{
console.log('got word from arduino:', data);
shell.exec('./message "'+data+'-this message was sent to you by eye movements" "Mom"');
});
You need to npm install shelljs and npm install serialport.
Bash File
!#/bin/bash
MSG=${1?Error:no message}
CONTACT=${2?Error:no contact provided}
osascript -e 'tell application "Messages" to send "'"${MSG/\"/\\"}"'" to buddy "'"${CONTACT//\"/\\"}"'"'
You need change the permissions to allow the script to be executable for the user with chmod +x filename and you need use the correct bash interpreter location after the shebang (!#). More info here.
Wrap Up
So that’s a quick overview. I hope to do a more thorough tutorial in the future. But I wanted to push this out soon for those who are curious.
Let me know if you have any questions on Twitter @DashBarkHuss.
This is something, someone working on!
Very cool! Lucid dream messaging soon!